
Professor Guang-Zhong Yang from the Institute of Medical Robotics Published Research Findings on Microtentacle Actuators Based on Shape Memory Alloy Smart Soft Composite in Advanced Functional Materials
July 07, 2020
Recently, Guang-Zhong Yang, Dean of the Institute of Medical Robotics, Shanghai Jiao Tong University, published a research paper “Microtentacle Actuators Based on Shape Memory Alloy Smart Soft Composite” in Advanced Functional Materials. (DOI:10.1002/adfm.202002510)
Recent advances in miniature robotics have brought promising improvements in performance by leveraging the latest developments in soft materials, new fabrication schemes, and continuum actuation. Such devices can be used for applications that need delicate manipulation such as microsurgery or investigation of small-scale biological samples. The shape memory effect of certain alloys is one of the promising actuation mechanisms at small scales because of its high work density and simple actuation mechanism. However, for sub-millimeter devices, it is difficult to achieve complex and large displacement with shape memory alloy actuators because of the limitation in the fabrication process.
Herein, a fabrication scheme for miniaturized smart soft composite actuator is proposed by utilizing two-photon polymerization. The morphing modes are varied by changing the direction of the scaffold lamination. In addition, the actuation is controlled via local resistive heating of a carbon nanotube layer deposited inside of the actuators. The proposed design can generate a 390 µN force and achieve a bending angle up to 80°. Applications of the actuators are demonstrated by grasping small and delicate objects with single and two finger devices.

Figure 1. Design and actuation mechanism of the miniature soft actuator.
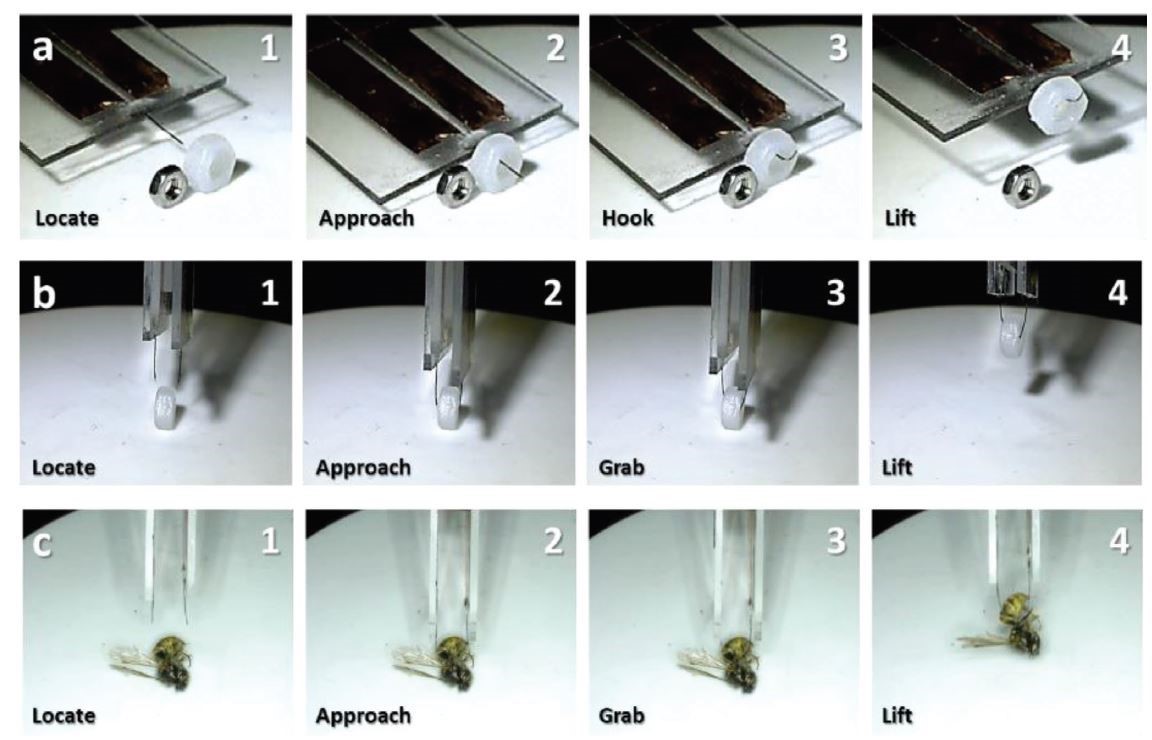
Figure 2. Demonstration of object manipulation with tentacle actuators. a) Lifting weight with a single tentacle. b) The gripping motion of double-side tentacle actuators (Weight of the object is 80 mg.) and c) grabbing a wasp. The gripper can handle delicate objects without damages.
Full text link:
Address:Wenxuan Building, 800 Dongchuan RD, Minhang District, Shanghai, China
Tel: +86 21 34204018
Zip: 200241
Address:No3 Teaching Building, 1954 Huashan RD, Xuhui District, Shanghai, China
Tel: +86 21 62933344
Zip: 200030

BME WeChat
copyright: Copyright@2018 School of Biomedical Engineering, Shanghai Jiaotong University
Shanghai Jiaotong ICP Bei 05227
沪交ICP备20210179